GlobalfourAnalysis of large satellite navigation system
Abstract: in order to further study the satellite navigation system, the four existing global satellite navigation systems are compared and analyzed: from the aspects of constellation, signal system, coordinate and time system and service performance, Beidou satellite navigation system (BDS), global positioning system (GPS) Galileo satellite navigation system (Galileo) and GLONASS satellite navigation system (GLONASS) are compared; Point out the advantages of BDS. The results show that BDS has great advantages in system Constellation and information coding, and the system service performance is equivalent to GPS and Galileo, and better than GLONASS; BDS is based on the constellation distribution of geostationary orbit (GEO), inclined geosynchronous orbit (IGSO) and mid circular earth orbit (MEO), which can improve the positioning accuracy and availability in the Asia Pacific region; The 64 ary low density parity check (LDPC) coding adopted by BDS is better than that of other systems. Compared with the binary LDPC coding of GPS, it can bring an additional gain of 0.6 ~ 1.2 dB.
Key words: global satellite navigation system; System constellation; Signal system; Coordinate system; System; Service performance
0. Introduction
At present, there are four major global navigation satellite systems (GNSS), including China's Beidou navigation satellite system (BDS), the United States' global positioning system (GPS) Galileo Navigation Satellite System (Galileo) of EU and Global Orbiting Navigation Satellite System (GLONASS) of Russia. Among them, BDS and GPs have served the world with comparable performance; In terms of functions, BDS has more regional short message and global short message functions than GPS
。 Although GLONASS has been in service all over the world, its performance is slightly inferior to BDS and GPS, and GLONASS has a large orbital inclination, resulting in poor performance in low latitudes. Galileo's observation quality is good, but the stability of spaceborne clock is slightly poor, resulting in poor system reliability.
GNSS is mainly composed of space segment, ground segment and user segment
As follows:
1) In the space segment, the navigation satellites distributed according to the constellation receive the clock correction, ephemeris and other information injected upstream from the ground segment for signal modulation, and broadcast the signal to the ground according to the specified signal system.
2) The ground segment tracks and maintains the space satellite, monitors the health status of the satellite, evaluates the integrity of the satellite and signals, determines the operation orbit of the satellite, and injects the satellite clock error correction, ephemeris, almanac, ionospheric correction parameters and other information into the satellite according to a specific frequency.
3) The user section receives the signals of each visible satellite, and calculates the position, speed and time (PVT) according to the ephemeris and time information obtained from the observation and demodulation signals obtained from the tracking signal to determine the user's position, speed and time information.
The space segment of the navigation system mainly includes two important characteristics:
① A space constellation representing the spatial distribution of satellites;
② Characteristics of satellite broadcast signals. As far as the whole system is concerned, users are most concerned about its service performance. This paper mainly compares the space constellation, signal system, coordinate and time system and service performance of GNSS, and analyzes the characteristics of BDS.
1. Comparative analysis of GNSS constellation
The elements of space constellation of satellite navigation system mainly include constellation type, satellite type, number of satellites, orbital altitude, orbital inclination, etc. The constellation distribution of GPS, Galileo and GLONASS is roughly the same, and the satellites are medium earth orbit (MEO) satellites. The BDS constellation includes MEO satellites, inclined geo synchronous orbit (IGSO) satellites and geostationary orbit (GEO) satellites. The three geo satellites of BDS are located above the equator and distributed at 80 & deg respectively; E、110.5° E and 140 & deg; E up. Three IGSO satellites of BDS are distributed on three orbital planes
[3]
。 The 24 MEO satellites of BDS are evenly distributed on three orbital planes, and the trajectory of subsatellite points covers the world. Through the MEO / IGSO / geo constellation layout, BDS can greatly improve the visibility of BDS satellites in the Asia Pacific region, and then improve the positioning accuracy and availability of BDS.
|
Satellite navigation system name
|
Navigation satellite parameters of different satellite navigation systems
|
|
Constellation type
|
satellite
type
|
Number of satellites of different types
|
Orbital altitude of different types of satellites / km
|
Different types of satellites
Track inclination / (& deg;)
|
Different types of satellites
Orbital cycle
|
Track surface
number
|
Constellation distribution repetition period
(times / day)
|
|
BDS
|
The constellation of MEO is walker type 24 / 3 / 1
|
GEO
IGSO
MEO
|
three
three
twenty-four
|
35 786
35 786
21 528
|
—
fifty-five
fifty-five
|
—
23 h 56 min 4 s
12 h 55 min
|
—
—
three
|
13/7
(repeated 13 times in 7 days)
|
|
GPS
|
Non Walker Constellation
|
MEO
|
twenty-four
|
20 200
|
fifty-five
|
11 h 58 min
|
six
|
2/1
(repeat twice a day)
|
|
Galileo
|
Walker Constellation 24 / 3 / 1
|
MEO
|
twenty-four
|
23 222
|
fifty-six
|
14 h 4 min 45 s
|
three
|
17/10
(repeated 17 times in 10 days)
|
|
GLONASS
|
Walker Constellation 24 / 3 / 2
|
MEO
|
twenty-four
|
19 100
|
sixty-four point eight
|
11 h 15 min 44 s
|
three
|
17/8
(repeated 17 times in 8 days)
|
surface
one
Comparison of global satellite navigation system space constellations
2. Comparative analysis of GNSS system
The four satellite navigation systems have their own characteristics. In terms of multiple access mechanism, the multiple access mechanism of BDS, GPS and Galileo is code division multiple access (CDMA), and the multiple access mechanism of GLONASS is frequency division multiple access (FDMA). Its modernization plan is to develop to CDMA. In terms of signal components, BDS, GPS and Galileo go through a long process in addition to some authorized or special-purpose proprietary signal components
During the period of research and coordination, a compatible and interoperable cooperation agreement was reached on civil public signals, realizing the interoperability between BDS B1C and B2A and GPS L1, L5 and Galileo E1 and E5A respectively, which can greatly improve the service performance of satellite navigation system and reduce the development cost of multi system user terminal.
Table 2 compares and analyzes the four satellite navigation signal systems mainly from the aspects of signal frequency, signal branch, modulation mode, information coding mode, symbol rate and signal bandwidth, so that readers can have a comprehensive and systematic understanding of the signals of each system.
|
System name
|
signal
|
signal
weight
|
Carrier frequency / MHz
|
modulation mode
|
Information coding method
|
Symbol rate in seconds
(represented by "number of samples")
|
Main valve band
Width / MHz
|
Broadcast satellite type
|
|
BDS
|
B1I
|
I way
|
1 561.098
|
BPSK(2)
|
BCH (15,11,1) interleaving
|
fifty
|
2.046 0
|
GEO/IGSO/MEO
|
|
B1C
|
B1C_ data
|
1 575.420
|
BOC(1,1)
|
BCH (21,6) BCH (51,8) 64 base LDPC (200100) 64 base LDPC (88,44) interleaving
|
one hundred
|
32.736 0
|
IGSO/MEO
|
|
B1C_ pilot
|
QMBOC(6,1,4/33)
|
—
|
0
|
|
B2a
|
B2a_ data
|
1 176.450
|
QPSK(10)
|
64 base LDPC (96,48)
|
two hundred
|
20.460 0
|
IGSO/MEO
|
|
B2a_ pilot
|
—
|
0
|
|
B2b
|
I way
|
1 207.140
|
QPSK(10)
|
64 base LDPC (162,81)
|
one thousand
|
20.460 0
|
IGSO/MEO
|
|
B3I
|
I way
|
1 268.520
|
QPSK(10)
|
BCH (15,11,1) interleaving
|
fifty
|
20.460 0
|
GEO/IGSO/MEO
|
|
GPS
|
L1
|
C/A
|
1 575.420
|
BPSK(1)
|
Hamming code (32,26)
|
fifty
|
2.046 0
|
MEO
|
|
P(Y)
|
BPSK(10)
|
encryption
|
fifty
|
20.460 0
|
|
M
|
BOC(10,5)
|
encryption
|
—
|
30.690 0
|
|
L1C
|
L1C-D
|
1 575.420
|
BOC(1,1)
|
Crc-24q BCH (51,8) binary LDPC (1200600) block interleaving
|
one hundred
|
4.092 0
|
MEO
|
|
L1C-P
|
TMBOC(6,1,4/33)
|
—
|
—
|
14.332 0
|
|
L2
|
P(Y)
|
1 227.600
|
BPSK(10)
|
encryption
|
fifty
|
20.460 0
|
MEO
|
|
C
|
BPSK(1)
|
Crc-24q convolutional coding (600300)
|
fifty
|
2.046 0
|
|
M
|
BOC(10,5)
|
encryption
|
—
|
30.690 0
|
|
L5
|
L5C
|
1 176.450
|
QPSK(10)
|
Crc-24q convolutional coding (600300)
|
one hundred
|
20.460 0
|
MEO
|
|
L5Q
|
encryption
|
—
|
|
|
Galileo
|
E1
|
E1-A
|
1 575.420
|
BOCCOS(15,2.5)
|
encryption
|
one hundred
|
35.805 0
|
MEO
|
|
E1-B
|
CBOC(6,1,1/11,’ ’)
|
Crc-24q convolutional coding (240120) interleaving
|
|
4.092 0
|
|
E1-C
|
CBOC(6,1,1/11,’ ’)
|
—
|
|
4.092 0
|
|
E5a
|
E5a-I
|
1 176.450
|
AltBOC(15,10)
|
Crc-24q convolutional coding (488244) interleaving
|
fifty
|
51.150 0
|
MEO
|
|
E5b
|
E5b-I
|
1 207.140
|
Crc-24q convolutional coding (240120) interleaving
|
two hundred and fifty
|
|
E6
|
E6-A
|
1 278.750
|
BOCCOS(10,5)
|
encryption
|
one hundred
|
30.690 0
|
MEO
|
|
E6-B
|
BPSK(5)
|
encryption
|
one thousand
|
10.230 0
|
|
E6-C
|
BPSK(5)
|
—
|
—
|
10.230 0
|
|
GLONASS
|
G1
|
1 598.0 625~1 605.375
|
BPSK
|
Hamming code
|
one hundred
|
8.334 5
|
MEO
|
|
G2
|
1 242.9 375~1 248.625
|
BPSK
|
Hamming code
|
one hundred
|
6.709 5
|
surface
two
GNSS
Signal system comparison
[4-9]
Table 2: BPSK (binary phase shift keying) indicates two-phase phase shift keying; Qmboc (quadrature multiplexed binary offset carrier) represents quadrature multiplexed binary offset carrier modulation; Tmboc (time multiplexed binary offset carrier) represents time division multiplexed binary offset carrier; CBOC (composite binary offset carrier) represents composite binary offset carrier; BCH (Bose Chaudhuri hocquenghem) represents binary linear cyclic codes independently discovered by Bose, Chaudhuri and hocquendhem; CRC (cyclic redundancy check) indicates cyclic redundancy check.
It can be seen from table 2 that the B1C signal of BDS, the L1C signal of GPS and the E1 signal of Galileo operate at 1575.42 MHz, and the debugging mode is binary offset carrier (BOC) modulation; B2A signal of BDS, L5 signal of GPS and E5A signal of Galileo operate at 1176.45 MHz, in which B2A and L5 are quadrature phase shift keying (QPSK) modulation mode and E5A is alternate binary offset carrier (AltBOC) modulation mode. The consistency of frequency and the similarity of modulation modes create preconditions for the compatibility and interoperability of GNSS. At present, the compatibility and interoperability can be achieved very well on 1575.42 MHz.
In terms of navigation message design, BDS takes 64 band low density parity check (LDPC) coding as an important feature and introduces navigation message coding. Its coding and decoding schemes are independently developed by China, and the performance is greatly improved compared with GPS binary LDPC coding. The complexity of 64 ary LDPC coding is basically the same as that of binary LDPC coding; In terms of decoding, the complexity of 64 binary decoding is about 6 times that of binary decoding. The bit error rate is 1 & times; ten
-5
Under the condition of, the 64 ary LDPC coding gain is 0.6 ~ 1.2 dB higher than the binary LDPC coding gain, which brings considerable benefits to the improvement of cold start related indicators of user terminals
。
3. Comparative analysis of GNSS coordinate and time system
3.1} comparative analysis of coordinate system
The coordinate system of satellite navigation system is particularly important. The satellite position and satellite speed calculated from satellite ephemeris parameters and almanac parameters are directly characterized in the system coordinate system. The system coordinate system defines the datum ellipsoid required to establish the corresponding geodetic coordinate system, describes the earth gravity field model corresponding to the geoid, and provides the corrected basic geodetic parameters. The corrected basic geodetic parameters of each system are shown in Table 3.
|
System name
|
Coordinate system name
|
Coordinate system parameters
|
|
Ellipsoid long radius / M
|
Oblateness
|
Gravitational constant/
|
Earth rotation velocity/
|
|
BDS
|
BDCS
|
6 378 137.00
|
1/298.257 222 101
|
3.986 004 418
|
7.292 115
|
|
GPS
|
WGS84
|
6 378 137.00
|
1/298.257 223 563
|
3.986 004 418
|
7.292 115
|
|
Galileo
|
GTRF
|
6 378 136.55
|
1/298.257 690 000
|
3.986 004 418
|
7.292 115 146 7
|
|
GLONASS
|
PZ90
|
6 378 136.00
|
1/298.257 839 303
|
3.986 004 418
|
7.292 115
|
surface
three
Basic geodetic parameters of each coordinate system
[4-9]
Beidou coordinate system (BDCs) is an earth reference system with earth center and earth fixation. The definition of BDCs complies with the International Earth Rotation Service (IERS) specification and adopts the reference ellipsoid parameters of China Geodetic Coordinate System 2000 (CGCS2000). The main difference between BDCs and CGCS2000 is the update frequency. BDCs is the special coordinate system of BDS, which can be updated once a year or half a year; CGCS2000 is a national coordinate system with wide correlation area and long update interval. The implementation of BDCs will be aligned with the latest international terrestrial reference frame (ITRF). WGS84 (World geodetic system 84) is a geodetic coordinate system adopted by American GPS; Gtrf (Galileo terrestrial reference frame) is a geodetic coordinate system adopted by Galileo in the European Union; Pz-90 (pz-90 geodetic system) is a geodetic coordinate system established by Russia.
3.2} comparative analysis of time system
Time system is the core of satellite navigation system and the cornerstone of the normal operation of satellite navigation system. BDS, GPS and Galileo have established a special time system based on atomic time (at). Their second length is synthesized according to the observation of atomic clock and satellite atomic clock installed on their ground monitoring station. It is still atomic time in essence, so it is continuous and does not need leap seconds like coordinated universal time. GLONASS system time (glonasst) is different from the other three system times. It is an atomic time system similar to coordinated universal time (UTC). Leap seconds are introduced into the runtime, which is based on Moscow time and traced to the coordinated universal time (Su) maintained by the Russian Institute of time metrology.
Beidou time (BDT) is generated and maintained by BDS master control station and traced to coordinated universal time UTC (NTSC) maintained by national time service center. GPS time (GPST) is generated and maintained by the GPS master control station and traced to the coordinated universal time UTC (usNo) maintained by the US Naval Observatory
[12]
。 Galileo time (GST) is directly traceable to the coordinated universal time UTC (BIPM) maintained by the International Bureau of weights and measures (BIPM).
International Atomic Time (TAI) takes atomic seconds as the unit and starts to accumulate from 0:00 of universal time (UT) 1958-01-01. At this time, the difference between world time and international atomic time is zero, and then increases year by year. In 1972, in order to coordinate the difference between international atomic time and universal time, a compromise scheme, coordinated universal time, was proposed. Coordinated universal time is based on the accurate Tai second length. When the gap between it and universal time exceeds 0.9 s, 1 s is artificially added in the form of leap seconds to keep the difference between universal time and coordinated universal time within 0.9 s
[13]
。 The system time comparison of the four satellite navigation systems is shown in Table 4.
|
satellite navigation
System name
|
Time system parameters of different satellite navigation systems
|
|
Time system name
|
Starting epoch
|
Continuous
|
Lag time of Tai / S
|
|
BDS
|
BDT
|
2006-01-01 00:00:00(UTC)
|
yes
|
thirty-three
|
|
GPS
|
GPST
|
1980-01-06 00:00:00(UTC)
|
yes
|
nineteen
|
|
Galileo
|
GST
|
13 s before August 22, 1999 00:00:00 (UTC)
|
yes
|
nineteen
|
|
GLONASS
|
GLONASST
|
Lag UTC (Su) 3 h
|
no
|
Change with leap second
|
surface
four
GNSS
Time system comparison
According to the comparative analysis, the starting epoch of GST is set to 13 s before 1999-08-22t 00:00:00 (UTC) in order to be consistent with GPST. Both GST and GPST lag behind Tai by 19 s.
The conversion relationship between each system is shown in Figure 1.
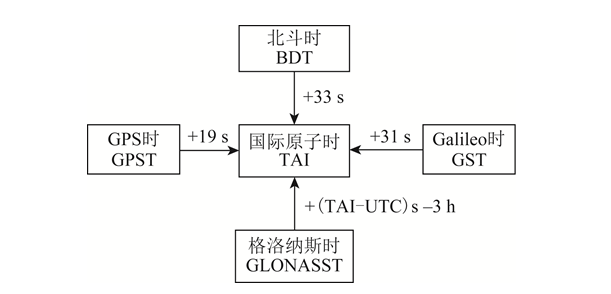
chartone System time conversion relationship
4. Comparative analysis of GNSS service performance
The service performance of satellite navigation system includes accuracy, integrity, continuity and availability, among which the user is most concerned about accuracy and availability.
Service accuracy includes positioning accuracy, speed measurement accuracy and time measurement accuracy. Positioning accuracy is the statistical value of the difference between the position determined by the user using satellite signals and its real position, including horizontal positioning accuracy and vertical positioning accuracy. The velocity measurement accuracy is the statistical value of the difference between the speed determined by the user using the satellite signal and its real speed, which is generally a three-dimensional space velocity error. The time measurement accuracy is the statistical value of the difference between the time determined by the satellite signal and the time of the satellite navigation system.
Service availability is the ratio of system serviceable time to expected service time. The serviceable time is the time when the position dilution of precision (PDOP) availability and positioning availability meet the requirements within the specified area. PDOP availability is the percentage of time when the PDOP value meets the threshold requirements within the specified geographical or spatial area and time period. Location availability is the percentage of time that the location accuracy meets the threshold requirements within the specified service area and time period.
The positioning accuracy of the navigation system is mainly determined by two factors: ① PDOP value; ② User equivalent range error (uere). The uere consists of user range error (ure) and user equipment error (UEE). Wherein: ure is the sum of the errors of satellite to user terminal distance measurement caused by the errors of navigation satellite orbit and satellite clock difference, which is mainly determined by the satellite navigation system; UEE is an error caused by ground multipath effect and user receiver loop noise, which is mainly determined by the use environment and the design of local receiver.
According to the service performance specifications of BDS, GPS, Galileo and GLONASS and the latest official conference materials
[3,14-17]
, sort out the public service performance parameters of each global satellite navigation system, and the results are shown in Table 5. In Table 5, RMS (root mean square) represents the root mean square.
|
System name
|
URE/m
|
URRE/(m·s-1)
|
Positioning accuracy at 95% reliability / M
|
Velocity measurement accuracy/
(m·s-1)
|
At 95% reliability
Time measurement accuracy / NS
|
|
horizontal direction
|
Elevation direction
|
|
BDS
|
B1C/B2a:0.6(RMS)
|
0.006(RMS)
|
ten
|
ten
|
0.2(95 %)
Results under reliability
|
twenty
|
|
B1I/B3I:1(RMS)
|
|
GPS
|
The result at 95% reliability is 7.8
|
The result at 95% reliability is 0.006
|
nine
|
fifteen
|
zero point one
|
forty
|
|
Galileo
|
The result at 95% reliability is 7
|
—
|
four
|
eight
|
—
|
thirty
|
|
GLONASS
|
The result at 95% reliability is 18
|
The result at 95% reliability is 0.02
|
five
|
nine
|
—
|
seven hundred
|
surface
five
GMSS
Expose service performance parameters
In fact, the measured performance of each satellite navigation system is better than the promised public service performance. According to the report of China Satellite Management Office at the 14th International Committee on global navigation satellite system (ICG) meeting in 2019
[18]
, the measured horizontal positioning accuracy of BDS b1i / b3i is 3.6 m (result under 95% reliability), the elevation positioning accuracy is 6.6 m (result under 95% reliability), the speed measurement accuracy is 0.05 M / S (result under 95% reliability), the timing accuracy is 9.8 ns (result under 95% reliability), and the measured horizontal positioning accuracy of B1C / B2A is 2.4 m (result under 95% reliability) The elevation positioning accuracy is 4.3 m (result under 95% reliability), the velocity measurement accuracy is 0.06 M / S (result under 95% reliability), and the timing accuracy is 19.1 ns (result under 95% reliability).
According to the 14th ICG conference in 2019, the National Coordination Office
Report of National Coordination Office (NCO)
[19]
, the statistical results from November 14, 2018 to November 13, 2019 show that the average ure of GPS is 0.514 m, the optimal ur is 0.362 m and the worst ur is 0.666 M. According to the report of the European Space Agency at the 14th ICG conference in 2019
[20-21]
, the ure of Galileo satellite in September 2019 is 0.27 m (the result under 95% reliability), and the worst positioning accuracy monitored in the equatorial region is 2.79 m (the result under 95% reliability).
5. Conclusion
In this paper, the existing four GNSS are compared in detail, the constellation characteristics of the system are analyzed, and the advantages of BOS MEO / IGSO / geo combined constellation are pointed out; The signal system of each navigation system is summarized, and the advantages of multi system compatibility and interoperability and BDS information coding are highlighted; The coordinate system and time system of each system are compared and analyzed; The service performance of satellite navigation system is analyzed,
The service performance parameters of each navigation system are summarized.
Through comparative analysis, it can be seen that after the globalization of BDS, it has advanced technology, complete functions and excellent performance. It has excellent compatibility and interoperability with GPS and Galileo, and has completely independent intellectual property rights. It is in the parallel stage with GPS, which provides an important guarantee for BDS to go to the world and become the international mainstream. With the country's continuous and vigorous investment in resources and manpower, it is expected that BDS will lead foreign GNSS in the near future.
This article is reproduced from "Surveying and mapping academic information", which supports the protection of intellectual property rights. Please indicate the original source and author. If there is infringement, please contact us to delete